What is the Difference Between Torque Control and Torque Limiting?

-
-

-
Now I get it!
Torque control 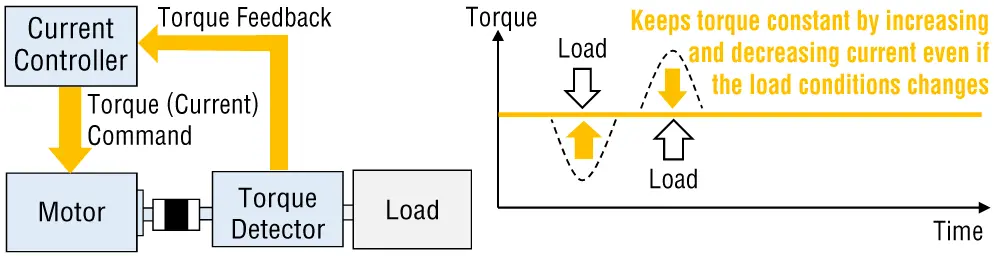
Torque limiting 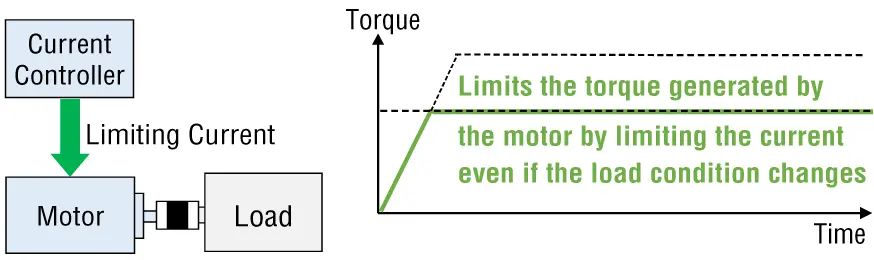
-
-
Good question. "Torque control" is used when you want to maintain a constant torque even when external forces fluctuate irregularly.
For example, they are used in the paper feed shafts of printers, where the amount and tension of paper fluctuates in real time, and in power assist applications such as overhead cranes for moving heavy objects.
On the other hand, "torque limiting" is recommended when you don't want to apply more force than necessary. Preventing winding equipment from pulling too much, preventing caps and screws from being damaged by over-tightening, press fitting and pushing pins...
Even for the applications that you may think "torque control" is necessary, "torque limiting" is sufficient if the upper limit of the force applied to the load is fixed. The system can be simplified and the cost can be reduced.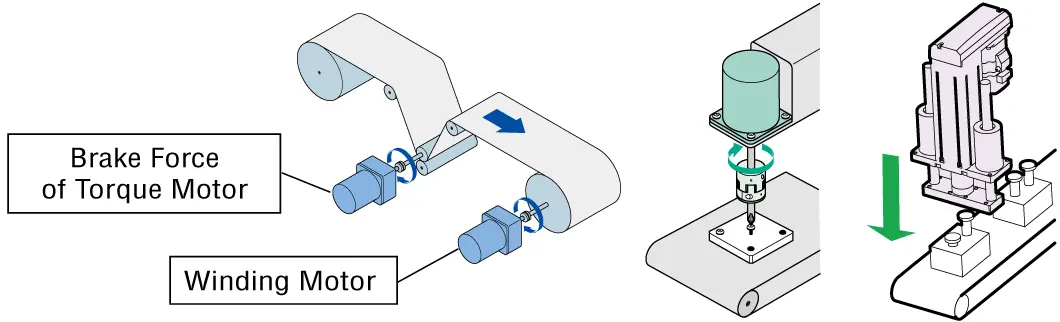
-
-
I have no choice. I'll use a cylinder as an example to describe a "press fit and pushing." The movement required for "press fitting" is the usage of press fitting a pin into a predetermined position. If you start out with too much force, the pins will break or bend at the base, so you want to gradually increase the force. This movement can be achieved by a function called "push-motion operation," which combines "torque limiting" with "position control," such as the number of millimeters from a given position.
If you increase the upper limit of torque step by step by a few millimeters for operation, you can control the "gradual increase in force" without using "torque control."Press fit the load to a predetermined position 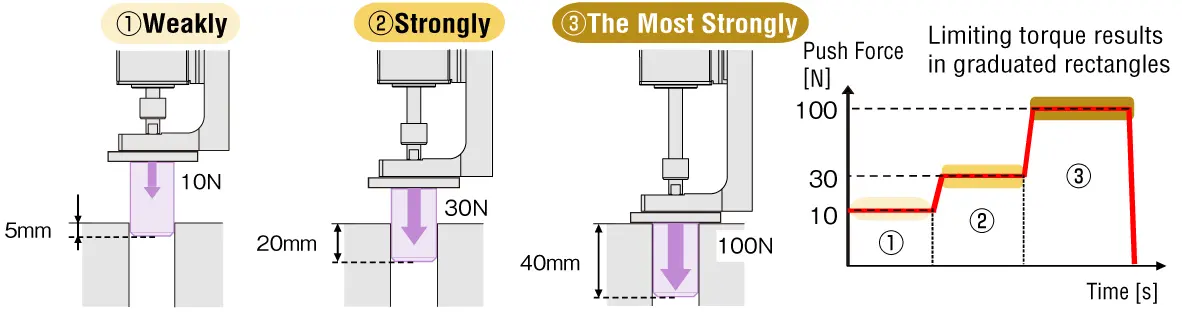
-
In the case of "push," it's often expected to be used to push a deformable object without breaking it. If you reduce the speed before hitting the load and then press down, you can prevent the load from being damaged by the impact.
Press down on the load as not to damage it 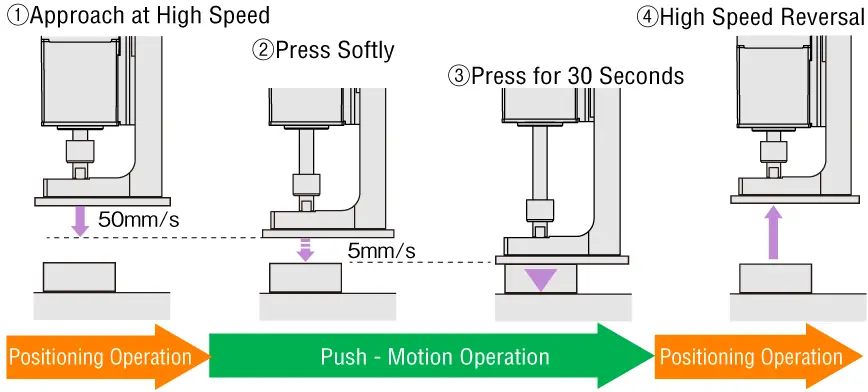
-
-
-
-
-
-



