Recently, there has been a growing need for "robots that can replace human work" due to worker shortages.
That's right. I've heard a lot of people say not only that they want to buy a robot that is suited for the required task or operation, but also that they want to create their own robot for the application they need. There are also Videos of Articulated Robot Demonstration Units on the website.
In fact, I've got a customer who have built his own robot, but is concerned that sometimes it's not able to achieve the positioning which he wants.
He says he's using a geared motor, but...
I wonder if there is a problem with the mechanism. I also wonder about the accuracy of the gearheads. Vex, do you remember what backlash is?
I'm not sure I can explain it well.
Then let's review it together. That might help you solve your customer's problem.
Please!
Backlash is the "gaps between the gears according to the design."
The word "gaps" doesn't really come with a positive impression to me, but are they necessary?
Gaps are needed. If the gears are assembled with no gaps between and pressed tightly together, the load will be too high and the gears won't turn.
So that's why the design needs to include appropriate gap space.
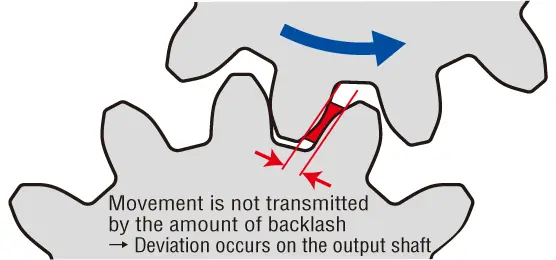
In unidirectional operation, the same gears keep touching each other, so the gaps won't be an issue. However, when using back-and-forth operation as with robots, the gap between the gears makes it difficult to reach the target position.
Figure 1 Backlash and Misalignment of Movement Transmission
I see. But the gaps between the gearheads are a small deviation from the perspective of the entire equipment, right? How do they affect to the robot?
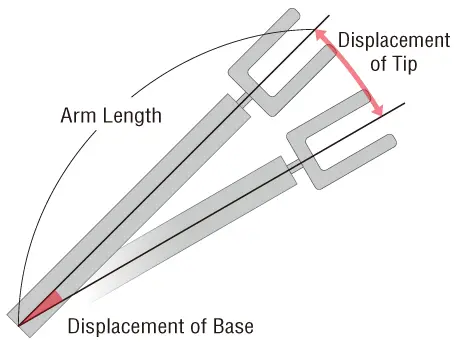
Look at Figure 2. Can you see that there is a big difference in the misalignment near the motor and at tip of the arm?
Figure 2 Backlash and Robot Tip Misalignment
Oh, you're right. That’s the principle of triangle similarity!
It looks like you understand that the backlash affects the misalignment of the robot's tip.
Robots in particular, require a high level of accuracy, so they often use tapered gears, gears with a special mechanism that sandwiches 2 gears from both directions to minimize the gap (low backlash), or gears shaped so that they can be assembled without gaps (non-backlash). For more information, take a look here.
Yes! I think I can make a proposal now.
Hold on. For this issue, you'll need to review lost motion as well.
What’s lost motion?
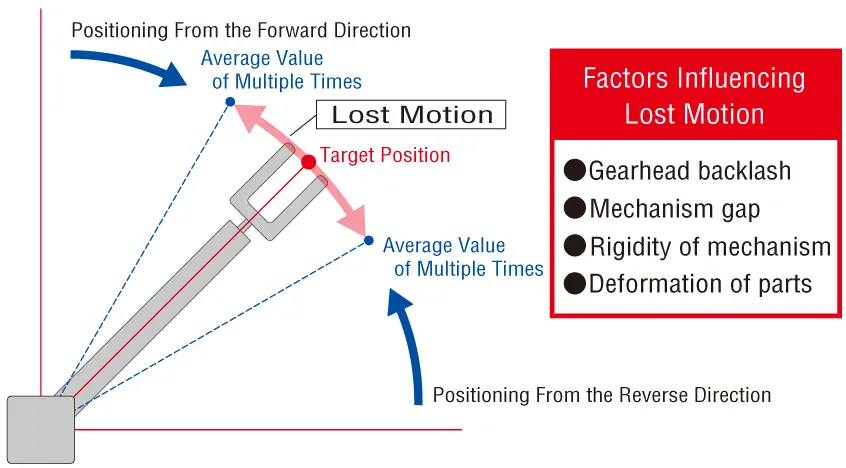
This is the value measured by a device that measures "maximum difference between the forward and reverse directions when positioning to a certain position." It's determined by JIS Standard, so check it out.
So backlash is something you design, on the other hand, lost motion is something you use equipment to measure?
Like this robot, the equipment is made up of various mechanical elements. You have to consider the influence of all those factors.
Figure 3 Lost Motion Image
I see. So that's why we need to measure it.
When it comes to determining the desired position with a robot, it is necessary to review not only the accuracy of the motor but also the accuracy of each component.
Yes. In order to reduce the effect, I'll suggest to choose the gearheads with the small backlash as possible!