What Conditions are Necessary for Selecting an AGV and AMR (Transport Robot)?

In this column, we will introduce what conditions are necessary for selecting an AGV and AMR and how each are involved in the selection calculations.
Conditions to Consider When Selecting a Motor for a Transport Robot
Factors Involving Weight
-

① Weight, one of the equipment conditions, is a necessary factor to determine the required torque and permissible inertia of the motor. Also, the load carrying capacity at standstill is determined by the permissible radial load. There is a limit to increase the permissible radial load with parallel shaft gearheads, so for customers who want to increase the load carrying capacity, I think it's a good idea to introduce the hollow shaft flat gearhead or flange drive adapter. When the flange drive adapter is assembled, it has a high strength of 1,500 N and the hollow shaft flat gearhead has a maximum strength of 2,040 N.
Side Mounting Hollow Shaft Flat Gearhead 
Top Mounting Flange Drive Adapter 
-
Driving Environment
Number of Transport Axes
-
The number of transport axes are the number of motors required to drive them. The required torque changes depending on the number of motors used. Most of transportation robots are 2-wheel drive. The general method is to use 2 tires to drive the vehicle and 4 tires around them to distribute the load. If a 2-wheel drive is used, various design methods can be considered depending on the location where the transport robot is running, such as being able to turn in a small space.
2-Wheel Drive Image 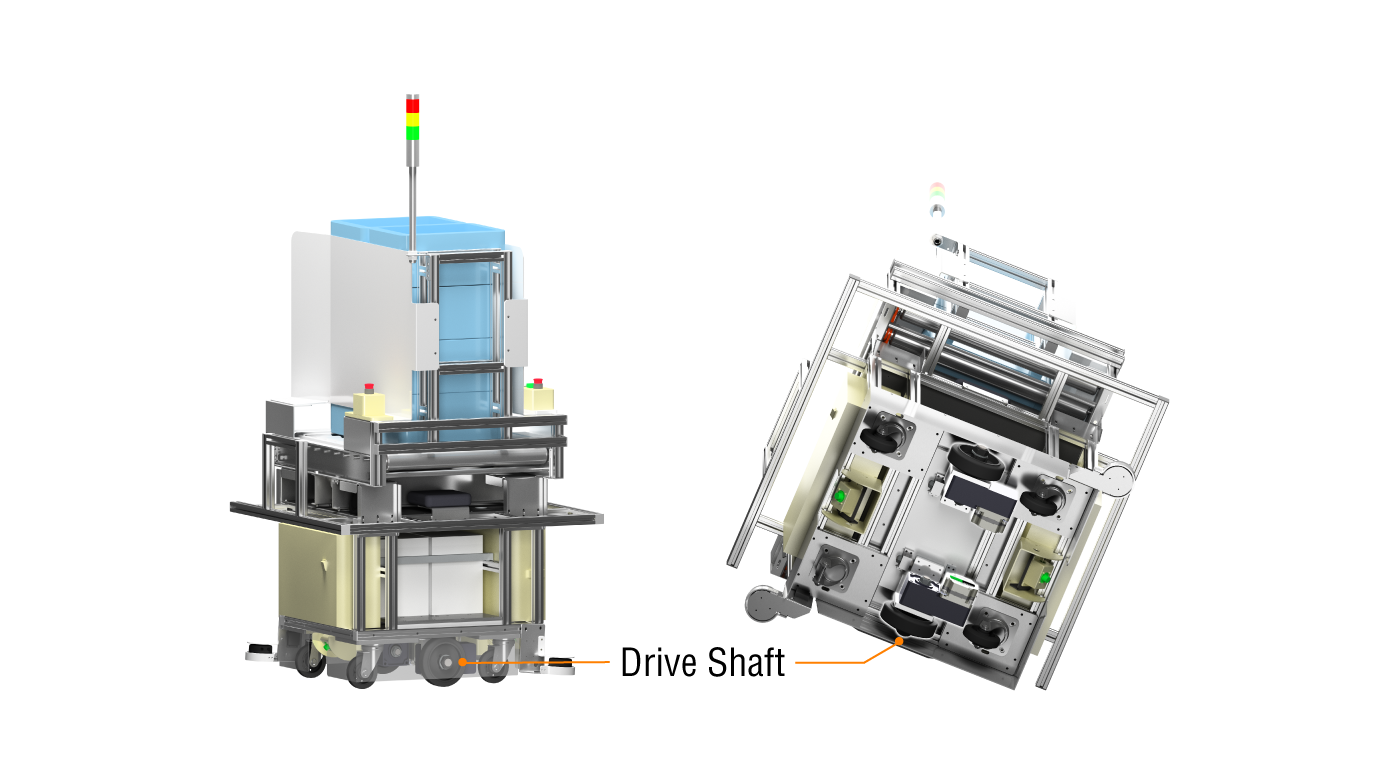
-
Power Supply Voltage
Factors Involving Driving Speed
Key Point of This Lecture
- Equipment Conditions and Operating Conditions Are Necessary to Select a Transport Robot
- Equipment Conditions Include Weight, Driving Environment, Number of Transport Axes and Wheel Diameter, and Power Supply Voltage, Which are Necessary Factors for Selection Calculations